Automation Systems
Automation Systems  Motion & Power Solutions
Motion & Power Solutions  Safety, Vision and IDENT
Safety, Vision and IDENT  Sensing Solutions
Sensing Solutions  Control Components
Control Components  Switching & Accessories
Switching & Accessories  Switchgear and Trolley Systems
Switchgear and Trolley Systems  Process Weighing
Process Weighing  LED Lighting
LED Lighting  Omron
Omron
 Mitsubishi
Mitsubishi
 Delta
Delta
 Autonics
Autonics
 Inno
Inno
 Panasonic
Panasonic
 Novotechnik
Novotechnik
 Orientalmotor
Orientalmotor
 Microscan
Microscan
 IPA
IPA
 Technomech
Technomech
 Intech
Intech
 Honeywell
Honeywell
 IOT & Traceability
IOT & Traceability
 Project & Panel Engg.
Project & Panel Engg.
 Application Case Studies
Application Case Studies
 Solutions by Industry
Solutions by Industry
 Solutions by Process
Solutions by Process
 Solutions by Product
Solutions by Product
 Youtube Videos
Youtube Videos
 Corporate Information
Corporate Information
 Company Profile
Company Profile
 Quality Policy
Quality Policy
 Mission Statement
Mission Statement
 Chairman's Message
Chairman's Message
 Intech Group Companies
Intech Group Companies



Compact Industrial SCARA
Compact Industrial Robot with light weight space saving arm. Its high speed operation is best suited for pick and place, labelling, tracking


last update: July 17, 2018
Downtime can be reduced.
Notifies you of faulty parts and such phenomena in the Sensor in real time.
The frequency of sudden failure can be decreased.
Condition monitoring of sensors and equipment to prevent troubles.
The efficiency of changeover can be improved.
The batch check for individual sensor IDs significantly decreases commissioning time.

While the presence or absence of cooling water is checked by means of the ON/OFF-based pressure sensor, it is unable to detect any drop in the flow rate of the cooling water or any rise in the cooling water temperature. For that reason,
· The transformer is not cooled, and gets overheated, potentially leading to sudden stops of the equipment and the entire line.
· The tip may be deformed, causing defective products.

Simultaneous monitoring of the flow rate and temperature changes, and informing of those changes, enable you to carry out predictive maintenance and reduce defective products.
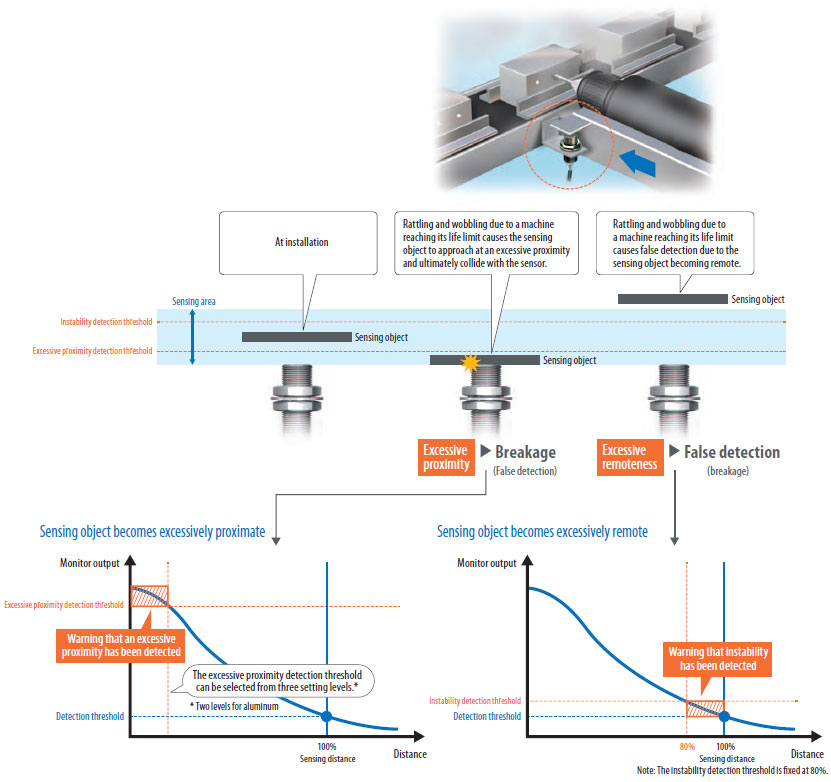
The detection position changes due to wear and vibration in the equipment’s mechanical parts and as a result, false detection and collision with the sensor have a negative impact on the equipment...

Constantly monitoring the position of the sensing object and notifying of excessive remoteness or proximity can be used for predictive maintenance of the equipment.
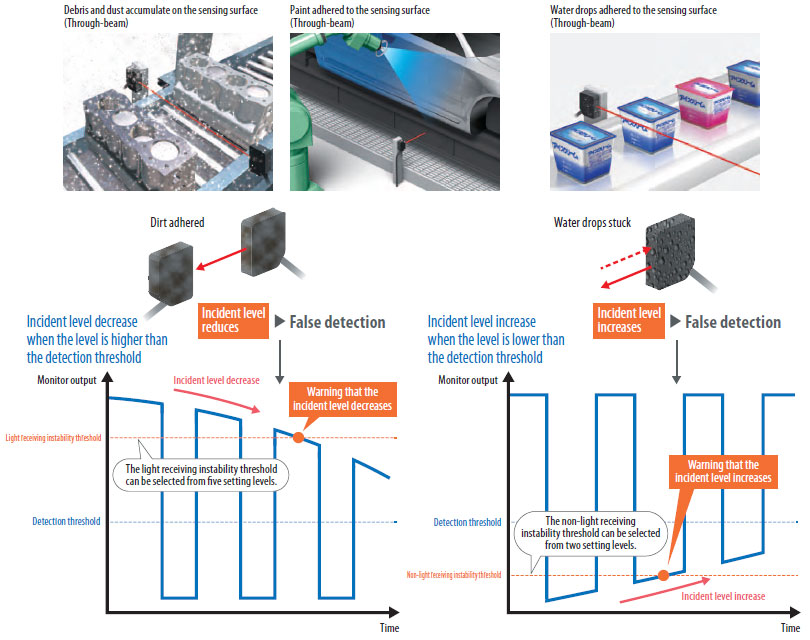
· In a conveyance process operating for 24 hours, dust or dirt accumulated on the detection surface of the photoelectric sensor, leading to a decline in the light incident level that causes the sensor to make false detection and the equipment to stop...
· Water drops stick to the sensing surface of the reflective sensor causing reflected light to enter...

With a response time of 1 ms, Photoelectric Sensor’s light incident level is output for monitoring. It is output when the light incident level exceeds the instability detection threshold, so you can check the site before false detection occurs and perform predictive maintenance.

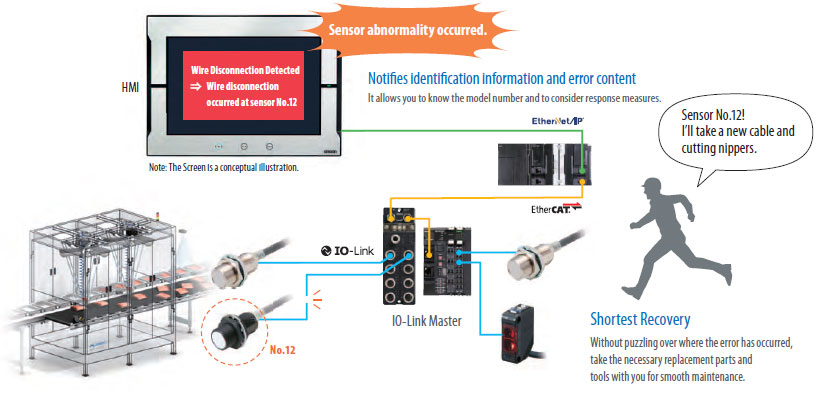
· An abnormality was displayed on the abnormality display screen, but upon going to look at the equipment, no external error was detected and the cause of the stop was not understood...
· Those responsible for maintenance investigated the cause of the abnormality from the activity of the stopped equipment, but because the maintenance person relied on the skill he or she has to identify the abnormality and replace the failed sensor, stoppages from 2 hours to several days occur...

When an abnormality occurs in a sensor, because you can see where the abnormality occurred and the factors estimated for it, you can go to where the abnormality occurred and recover the equipment in the shortest amount of time.
Also with wire disconnection detection, not only output wires, but also power lines can be detected unconditionally.
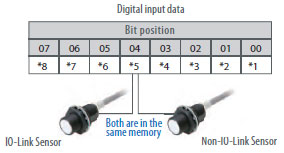
You need a quick recovery but you have only Non-IO-Link sensors with no IO-Link sensors in stock. You probably think in such a case, the control program needs modifications, and requires additional time for the recovery.
With IO-Link Master, since the IO-Link ON/OFF data and the data for Non-IO-Link sensors are located in the same memory, replacement with Non-IO-Link sensors can be carried out without any modification of the control program, resulting in a reduction of the equipment downtime.

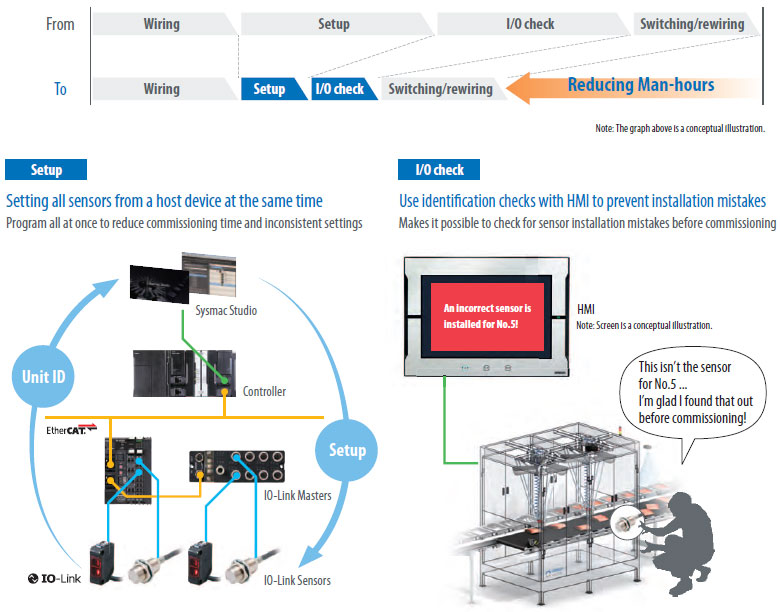
· During system start-up or changeover, operators had to perform the I/O check for each of the thousands of sensors installed on the line, and it took an enormous amount of time...
· When a sensor is installed wrong or an error occurs, wasteful work occurred that would normally be unnecessary...

By checking the sensor identification (manufacturer/sensor type/model number), you can easily check mistakes such as misconnected or unconnected sensors and installation mistakes.
Also, because it is possible to program multiple sensors at once using the command language used only for the controller, it is also possible to reduce commissioning time sharply.
For the connection of IO-Link Sensors and IO-Link Masters, two types are available: a screw-less clamp terminal block and an M12 connector.
In addition, NX-ILM400 IO-Link Master with screw-less clamp terminal block is connectable not only to EtherCAT, but also to EtherNet/IP communication coupler units, and you can choose between them according to the system configuration.
last update: July 17, 2018
last update: July 17, 2018
| Item | Specification |
|---|---|
|
Unit power supply voltage |
20.4 to 26.4 VDC (24 VDC -15%/+10%) |
| I/O power supply | 20.4 to 26.4 VDC (24 VDC -15%/+10%) |
| Noise resistance | Conforms to IEC 61000-4-4, 2 kV (power line). |
| Vibration resistance |
Malfunction: 10 to 60 Hz with amplitude of 0.7 mm, 60 to 150 Hz and 50 m/s2 for 80 minutes each in X, Y, and Z directions |
| Shock resistance | 150 m/s2 with amplitude of 0.7 mm |
| Dielectric strength | 600 VAC (between isolated circuits) |
| Insulation resistance | 20 MO min. (between isolated circuits) |
|
Ambient operating temperature |
-10 to 55°C |
|
Ambient operating humidity |
25% to 85% (with no condensation) |
|
Ambient operating atmosphere |
No corrosive gases |
| Altitude | 2,000 m max. |
| Storage temperature | -25 to 65°C |
| Storage humidity | 25% to 85% (with no condensation) |
| Degree of protection | IP67 |
| Mounting | M5 screw mounting |
| Mounting strength | 100 N |
|
Communications connector strength |
30 N |
| Connector types |
Connectors for EtherCAT communications: M12 (D-coding, female) × 2 Power supply connector: M12 (A-coding, male) × 1 I/O connectors: M12 (A-coding, female) *1 × 8 |
|
Screw tightening torque *2 |
Round connectors (communications connector, power supply, and I/O): 0.39 to 0.49 N·m M5 (Unit mounted from the front): 1.47 to 1.96 N·m Cover for node address setting switches: 0.4 to 0.6 N·m |
| Applicable standards *3 |
UL 61010-2-201, EU: EN 61131-2, RCM, KC, IO-Link conformance, and EtherCAT conformance |
*1. Confirms to Class A when used as an IO-Link connector.
*2. For SmartClick Connectors, insert the Connector all the way and turn it approx. 1/8 of a turn. Torque management is
not required.
*3. Ask your OMRON representative for the most recent applicable standards for each model.
| Item | Specification | |
|---|---|---|
| Unit name | IO-Link Master Unit | |
| Model | GX-ILM08C | |
| Number of IO-Link ports | 8 | |
|
Communications specifications |
Communications protocol | IO-Link protocol |
| Baud rate |
COM1: 4.8 kbps COM2: 38.4 kbps COM3: 230.4 kbps |
|
| Topology | 1:1 | |
| Compliant standards |
• IO-Link Interface and System Specification Version1.1.2 • IO-Link Test Specification Version1.1.2 |
|
|
Device power supply* in IO-Link Mode or SIO (DI) Mode |
Rated voltage | 24 VDC (20.4 to 26.4 VDC) |
| Maximum load current | 0.2 A/port | |
| Short-circuit protection | Yes | |
|
Digital inputs (in SIO (DI) Mode) |
Internal I/O common | PNP |
| Rated voltage | 24 VDC (20.4 to 26.4 VDC) | |
| Input current | 5 mA typical (at 24 VDC) | |
| ON voltage/ON current | 15 VDC min., 5 mA min. | |
| OFF voltage | 5 VDC max. | |
| Input filter time |
No filter, 0.25 ms, 0.5 ms, 1 ms (default), 2 ms, 4 ms, 8 ms, 16 ms, 32 ms, 64 ms, 128 ms, or 256 ms |
|
|
Digital outputs (in SIO (DIO) Mode) |
Internal I/O common | PNP |
| Output type | Push-pull | |
| Rated voltage | 24 VDC (20.4 to 26.4 VDC) | |
| Maximum load current | 0.3 A/port | |
| Short-circuit protection | Provided. | |
| Leakage current | 0.1 mA max. | |
| Residual voltage | 1.5 V max. | |
|
Digital inputs for pin 2 (in IO-Link Mode) |
Internal I/O common | PNP |
| Rated voltage | 24 VDC (20.4 to 26.4 VDC) | |
| Input current | 2 mA (24 VDC) | |
| ON voltage/ON current | 15 VDC min., 2 mA min. | |
| OFF voltage | 5 VDC max. | |
| Input filter time |
No filter, 0.25 ms, 0.5 ms, 1 ms (default), 2 ms, 4 ms, 8 ms, 16 ms, 32 ms, 64 ms, 128 ms, or 256 ms |
|
|
Cable specifications |
Cable type | Unshielded |
| Cable length | 20 m max. | |
|
Electrostatic capacity between lines |
3 nF max. | |
| Loop resistance | 6 O max. | |
| Dimensions |
175 × 33 × 60 mm (W × H × D) (The height is 49.1 mm when the connectors are included.) |
|
| Isolation method | Photocoupler isolation | |
| I/O power supply method | Supplied from the power supply connector. | |
| Unit power supply current consumption | 60 mA | |
| I/O power supply current consumption | 100 mA | |
| Weight | 430 g | |
| Circuit layout |

|
|
| Installation orientation and restrictions |
Installation orientation: 6 possible orientations Restrictions: No restrictions |
|
| Protective functions |
L+ terminal short-circuit protection C/Q terminal short-circuit protection |
|
| Function | Description | |
|---|---|---|
| Communications |
Cyclic communications |
I/O data (process data) in the IO-Link devices is cyclically exchanged with the IO-Link Master Unit as the IO-Link communications master. At the same time, this data and the status of the IO-Link Master Unit is cyclically exchanged with the controller, with the IO-Link Master Unit operating as a slave of the controller. Cyclic communications can be used to check the amount of detection performance deterioration in devices, and to check changes in usage conditions, such as the amount of incident light for photoelectric sensors, stability detection margins, and excessive proximity for proximity sensors. |
|
Message communications |
The controller can send messages (commands) to the IO-Link Master Unit and receive the response from the IO-Link Master Unit. The IO-Link Master Unit can also function as a gateway to send messages (commands and responses) between the controller and the IO-Link devices. During operation, you can change and adjust device parameters, such as threshold settings, tuning execution, and ON-delay time changes, from a program. Or, during operation, you can check the internal status, such as the operating times of devices. |
|
| Communications mode settings |
You can select any of the following modes for each port: IO-Link Mode, SIO (DI) Mode, SIO (DO) Mode, and Disable Port This allows you to combine IO-Link communications and digital I/O in a single unit. |
|
| Digital inputs for pin 2 | In IO-Link Mode, you can perform digital input with pin 2 while performing IO-Link communications. | |
|
Automatic baud rate setting for IO-Link communications |
The IO-Link Master Unit automatically matches the specific baud rates (COM1, COM2, or COM3) of the IO-Link devices to communicate with the IO-Link devices. Therefore, it is not necessary to set the baud rate of the connected device for each port. |
|
| Connected device verification |
This function is used to verify the configuration of IO-Link devices that are connected to the IO-Link Master Unit against the registered IO-Link device configuration settings when the power supply is turned ON. The user can enable or disable connected device verification. |
|
|
IO-Link communications error detection |
This function detects I/O cable breaks, disconnections from IO-Link device ports, error-level device events, device configuration verification errors, and IO-Link device malfunctions. | |
|
Detection of short-circuits in I/O cables |
This function detects short-circuits in I/O cables | |
| Notification of input data validity | The controller can use the Input Data Enabled Flags to determine whether the process input data for IO-Link communications is valid. | |
|
Load rejection for controller communications error |
This function turns OFF outputs from the IO-Link Master Unit when a communications error occurs in communications with the controller in IO-Link Mode or in an SIO mode. This prevents incorrect output operations when communications error occurs. |
|
|
IO-Link total communications lost frames |
The IO-Link total communications lost frames can be read from the CX-ConfiguratorFDT. You can use this function to determine communications status as affected by I/O cable noise or other factors. |
|
| Digital input filter | This function is used to eliminate chattering and noise of the input signal for digital inputs in SIO(DI) Mode or for digital inputs for pin 2 in IO-Link Mode. It prevents data change and stabilizes the input signal even in situations where the input data changes due to chattering or noise and the bit status is unstable. | |
| Digital input collection* |
In IO-Link Mode, this function reflects the specified bit data in the input data from the IO-Link device on the digital input data of the IO-Link Master Unit. As a result, the bit data in the input data from the IO-Link device can be aggregated into the digital input data of the IO-Link Master Unit. One bit for each IO-Link port can be aggregated. This function cannot be used in SIO (DI) Mode and SIO (DO) Mode. If you use this function, digital inputs with pin 2 cannot be used. |
|
|
Backup and restoration of parameter settings in IO-Link devices |
This function is used to back up parameter settings in IO-Link devices in the IO-Link Master Unit or restore them to IO-Link devices. This eliminates the need to set parameters again after replacing an IO-Link device. |
|
| Event log | This function records events, such as errors and status changes, that occur in the IO-Link Master Unit and the IO-Link devices. | |
* This function is supported with the unit version 1.1 or later.
| Item | Specification |
|---|---|
| Communications protocol | EtherCAT protocol |
| Modulation | Baseband |
| Baud rate | 100 Mbps |
| Physical layer | 100BASE-TX (IEEE 802.3) |
| Connectors |
M12 (D-coding, female) × 2 (shielded) CN IN: EtherCAT input CN OUT: EtherCAT output |
| Communications media |
Category 5 or higher (cable with double, aluminum tape and braided shielding is recommended.) |
| Communications distance | Distance between nodes (Slave Units): 100 m max. |
| Noise resistance | Conforms to IEC 61000-4-4, 1 kV or higher. |
| Node address setting method | Set on hexadecimal node address switches or with a Configuration Tool. |
| Node address range |
000 to FFF hex (0 to 4,095 decimal): Set on node address switches or with a Configuration Tool. |
| Indicators |
UNIT PWR × 1 IO PWR × 1 L/A IN (Link/Activity IN) × 1 L/A OUT (Link/Activity OUT) × 1 RUN × 1 ERR × 1 |
| Process data | Variable PDO mapping |
| PDO size/node | 2 to 270 bytes |
| Mailbox | Emergency messages, SDO requests, SDO responses, and SDO information |
| Synchronization mode | Free Run Mode (asynchronous) |
| GX Unit | Corresponding versions * | |||
|---|---|---|---|---|
| EtherCAT | ||||
| Model | Unit version | CPU Units | Sysmac Studio | CX-ConfiguratorFDT |
| GX-ILM08C | Ver.1.1 | Ver.1.12 or later | Ver.1.20 or higher | Ver.2.2 or higher |
| Ver.1.0 | Ver.1.12 or later | Ver.1.16 or higher | Ver.2.2 or higher | |
* Some Units do not have all of the versions given in the above table. If a Unit does not have the specified version,
support is provided by the oldest available version after the specified version. Refer to the user’s manuals for the
specific Units for the relation between models and versions.
last update: July 17, 2018
(Unit: mm)
last update: September 12, 2016
GX-ILM08C
last update: September 12, 2016